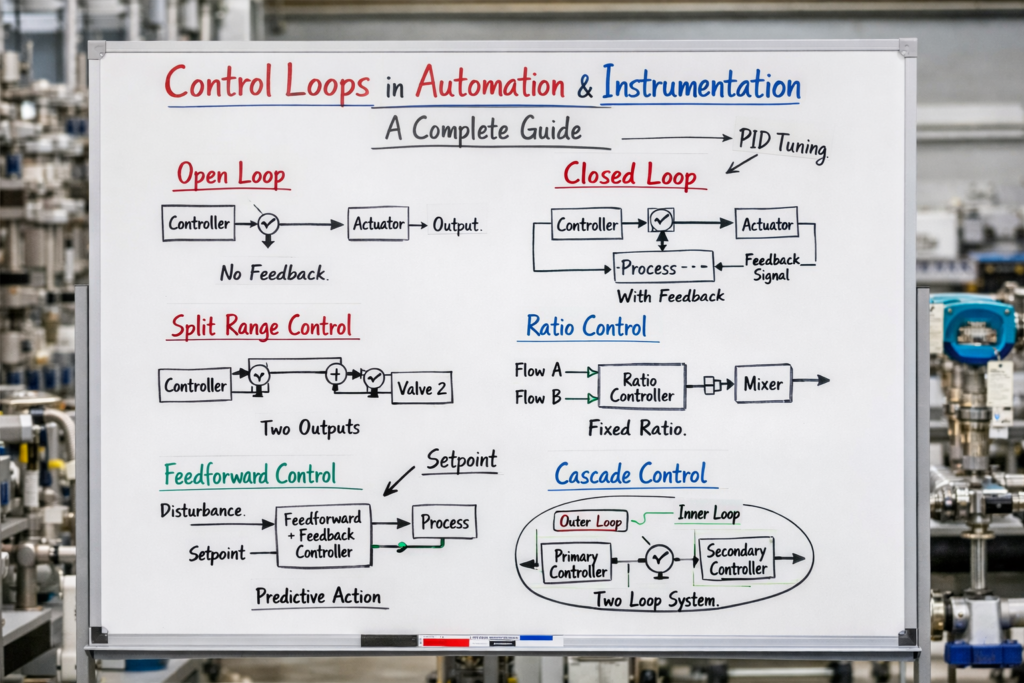
Closed Loop Control: The Self-Correcting Genius
What Is Closed Loop Control?
Closed loop control continuously monitors output and compares it against the desired target. When there’s a difference, it automatically adjusts. Think of it as having an obsessive quality inspector who never takes a break.
Complete Closed Loop Structure
How It Works – Step by Step
- Set Target (Setpoint): You want 72°F in your room
- Measure Actual (Process Variable): Sensor reads current temp: 68°F
- Calculate Error: Error = 72°F – 68°F = 4°F (too cold!)
- Controller Decides Action: “Turn heater to 80% power”
- Apply Correction: Heater runs at calculated power
- Monitor Result: Temp rises to 70°F
- Recalculate: New error = 72°F – 70°F = 2°F
- Adjust Again: “Reduce heater to 40% power”
- Repeat Forever… Until error approaches zero
Control Output = f(Error)
Controller continuously minimizes this error
The PID Controller – Heart of Closed Loop
PID = Proportional + Integral + Derivative
The most common closed loop controller combines three actions:
PID Components Explained
Real-World Examples
🌡️ Example 1: Home Thermostat
Setpoint: 72°F
What happens:
- Sensor reads 68°F → Error = 4°F → Heater ON at high power
- Temp reaches 71°F → Error = 1°F → Heater reduces to low power
- Temp hits 72°F → Error = 0° → Heater maintains minimum/cycles
- Door opens, temp drops to 70°F → System immediately responds
Why it’s better than open loop: Adapts to weather, occupancy, door openings—maintains comfort regardless of disturbances.
🚗 Example 2: Cruise Control
Setpoint: 65 mph
What happens:
- Going uphill: Speed drops to 62 mph → Error = 3 mph → Throttle increases
- Downhill: Speed rises to 68 mph → Error = -3 mph → Throttle reduces/brakes apply
- Wind resistance changes → System adjusts automatically
The magic: You never touch the gas pedal—system maintains exact speed regardless of terrain.
🏭 Example 3: Industrial Tank Level Control
Setpoint: Tank 75% full
What happens:
- Level sensor constantly measures actual level
- Too low → Inlet valve opens more
- Too high → Inlet valve closes
- Outlet demand changes → Inlet automatically compensates
Business impact: Never runs dry (production stops) or overflows (waste/safety hazard).
Tuning PID Controllers
Getting PID values right is part science, part art. Here’s what happens with different settings:
| Parameter | Too Low | Just Right | Too High |
|---|---|---|---|
| Kp (Proportional) | Slow response, never quite reaches target | Quick response, minimal overshoot | Oscillates wildly, unstable |
| Ki (Integral) | Steady-state error remains | Reaches exact setpoint, holds steady | Slow oscillation, integral windup |
| Kd (Derivative) | Overshoots target | Smooth approach, no overshoot | Too sensitive to noise, jittery |
Quick Tuning Method (Ziegler-Nichols)
- Set Ki and Kd to zero, increase Kp until system oscillates steadily
- Note oscillation period (Pu) and critical gain (Ku)
- Calculate: Kp = 0.6×Ku, Ki = 2×Kp/Pu, Kd = Kp×Pu/8
- Fine-tune from there based on performance
Response Curves – Effect of Tuning
Advantages & Challenges
✅ Why Closed Loop Wins:
- Automatic Error Correction: Self-adjusts to maintain target
- Handles Disturbances: Compensates for external changes
- Improved Accuracy: Maintains tight control (±1-5% typical)
- Consistent Quality: Output stays on target despite variations
- Reduced Manual Intervention: Operators don’t babysit
- Better Efficiency: Optimizes energy/resource use
⚠️ The Challenges:
- Complexity: More components, more failure points
- Cost: Sensors, controllers, wiring = $$$
- Tuning Required: Takes expertise to optimize
- Potential Instability: Poor tuning = oscillation/hunting
- Sensor Dependence: Bad sensor = bad control
- Maintenance: Calibration, troubleshooting complexity
Common Issues & Solutions
| Problem | Symptom | Fix |
|---|---|---|
| Oscillation | Output swings above/below setpoint | Reduce Kp, increase Kd |
| Steady-State Error | Never quite reaches target | Increase Ki (integral gain) |
| Slow Response | Takes forever to reach setpoint | Increase Kp, check actuator speed |
| Overshoot | Blasts past target then settles | Increase Kd (derivative), reduce Kp |
| Hunting | Never settles, constantly adjusting | Reduce all gains, check sensor noise |
| Integral Windup | Huge overshoot after disturbance | Add anti-windup logic, reduce Ki |
Types of Closed Loop Controllers
1. On-Off Controller (Bang-Bang)
Simplest form: Heater fully ON or fully OFF based on error
Example: Home thermostat (heat ON below 71°F, OFF above 73°F)
Pros: Simple, cheap | Cons: Oscillates around setpoint
2. Proportional (P) Controller
Output proportional to error: Big error = big correction
Limitation: Leaves steady-state error (offset)
3. PI Controller
Most common industrial: Fast response + eliminates offset
Use when: Derivative not needed (slow processes)
4. PID Controller
Full-featured: Best performance for complex processes
Use when: Need optimal response with no overshoot
5. Adaptive Controller
Self-tuning: Adjusts parameters based on performance
Use when: Process characteristics change over time
Applications
| Industry | Application | Controlled Variable |
|---|---|---|
| HVAC | Building climate control | Temperature, humidity |
| Automotive | Cruise control, engine management | Speed, air-fuel ratio |
| Chemical | Reactor temperature, pH control | Temperature, pH, pressure |
| Power | Generator frequency, voltage | Frequency, voltage |
| Manufacturing | Motor speed, position control | Speed, position, tor📩 Get Free Automation & Instrumentation TipsJoin 5,000+ engineers & get practical knowledge straight to your inbox |